IoT (12) - SPI 프로토콜
Updated:
12. SPI 프로토콜
이번 포스팅에서 다룰 주제는 임베디드 레벨에서 기본적으로 활용되는 시리얼 통신 중 하나인 SPI 프로토콜이다. SPI 통신은 I2C 와 UART 와 함께 센서 등의 모듈 제어 시 가장 많이 활용되는 통신으로, I2C와 마찬가지로 1:N 통신이 가능한 프로토콜이다.
SPI 통신에 관해서는 전문적으로 정리된 글들이 많으니, 조금만 찾아봐도 소스코드를 비롯해서 필요한 정보를 얻을 수 있을 것이다. 본 포스팅에서는 다음에 명시한 참고 링크 (Analog Device 사)의 내용을 토대로, 펌웨어 개발 관점에서 필요한 핵심적인 내용 위주로 이야기를 해보려고 한다.
12.1 프로토콜 개요
다음은 SPI 프로토콜 기반 시스템에서의 기본 하드웨어 구성이다. 2개의 핀 (SCL, SDA)을 필요로 하는 I2C 와 달리, SPI 에서는 기본적으로 4개의 핀을 필요로 한다. (물론 3-Wire 나, QSPI 등의 경우 개수가 다르긴 하지만, 본 포스팅에서는 4-Wire SPI 에 대해 주로 다루고자 한다.)
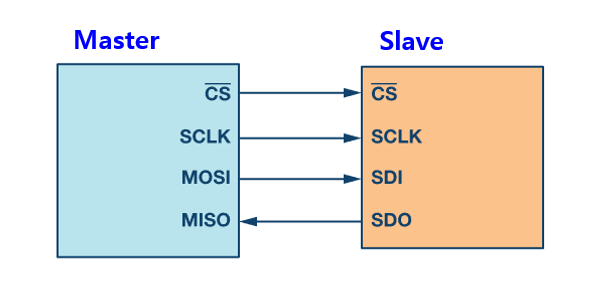
각각의 핀은 다음과 같은 역할을 수행한다
CS: Slave 선택 (Chip Select)SCLK: 클럭 신호 공급MOSI: Master -> Slave 데이터 라인MISO: Slave -> Master 데이터 라인
센서 및 제조사마다 이름이 조금씩 상이할 수는 있으나, 대부분 이러한 형태로 핀 이름을 정의하고 있다. CS 핀은 Master 에서 상호작용할 Slave 모듈을 선택하는 (주로 Active Low) 용도로 사용되며, SPI 통신의 경우 데이터 쓰기 (write)와 읽기 (read)가 동시에 수행되는 Full-Duplex 형태의 프로토콜이므로, 총 4 개의 핀을 필요로 한다.
Full-Duplex 구조이긴 하나, Master (e.g. 임베디드 프로세서)와 Slave (e.g. 센서) 사이의 인터페이스를 살펴보면 상호작용하는 규칙은
I2C와 크게 다르지 않다 (접근할 레지스터 주소를 입력하고 쓰기 혹은 읽기 등의 업무를 수행). 다만, 내부적으로 보면 명령어를 주고 받을 때마다MOSI,MISO핀에서 동시에 (비록 Dummy 값이더라도) 데이터를 주고 받고 있는 것을 볼 수 있다.
12.2 1:N 통신 지원
앞서 언급했듯이 SPI 통신은 I2C 처럼 1:N 통신이 가능한 프로토콜에 해당된다. I2C는 Slave 기기의 고유 주소 값으로 (7-bit or 10-bit) 기기를 구분했다면, SPI 에서는 CS 핀을 이용해 원하는 Slave 기기를 직접 선택하는 방식이다.
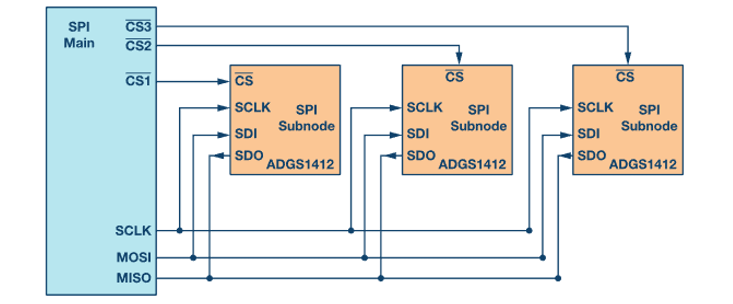
따라서, Slave 개수가 하나 추가될 때마다, Master 기기에서는 이를 위한
CS핀을 추가로 할당해야한다는 단점아닌 단점이 있다.
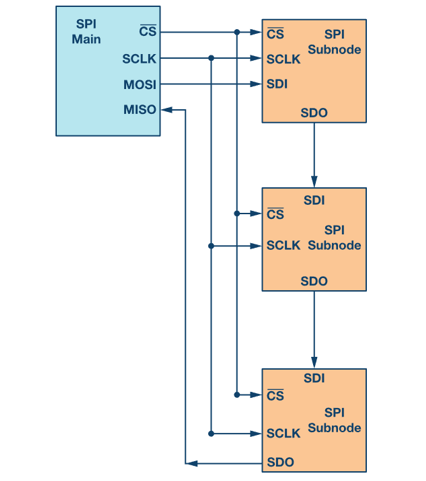
CS 핀이 늘어나는 문제를 보완하기 위해 다음의 그림과 같은 Daisy-Chain 구조를 이용하기도 한다.
12.2.1 장단점
필자는 주로 I2C 기반 센서를 제어하다보니, 처음 SPI 통신을 접했을 때 다음과 같은 의문이 들었었다.
어떤 이점 때문에
SPI프로토콜을 사용할까?
핀 개수도 적게 소모하는 I2C 프로토콜과 비교했을 때는 동일하게 1:N 통신을 지원한다는 점에서 큰 이점이 없는 것으로 보이지만, 개인적으로 생각했을 때는 크게 다음의 두 가지 이점이 있을 것으로 예상된다.
-
통신 속도:첫째는 당연한 이야기지만, 통신 속도에서의 이점이다. 근래에는 속도가 꽤 향상되기는 했으나, 기본적으로100 kbps수준의 통신 속도를 지원하는I2C와 비교했을 때,SPI는 수Mbps의 통신 속도를 제공한다. 즉, 고속 데이터 교환이 필요한 구조에서는SPI통신이 더 우위를 점한다. -
하드웨어 구조:이 부분은 전적으로 필자의 뇌피셜이므로 아닐 수 있는데,I2C와 달리SPI통신을 지원하는 Slave 기기는 기기의 고유 주소값을 필요로 하지 않으므로 하드웨어 구조 혹은 메모리 측면에서 이점이 있지 않을까 예상된다. (다만, 최근에는I2C와SPI프로토콜을 모두 지원하는 기기들도 많아서… 아무래도 아닐 가능성이 높을 듯 하다.🤨)
12.3 통신 모드 (0, 1, 2, 3)
SPI 프로토콜의 또 하나의 특징은 데이터를 읽는 타이밍 (Polarity)과 위상 (Phase)에 따라 총 4가지의 통신 모드가 존재한다는 것이다.
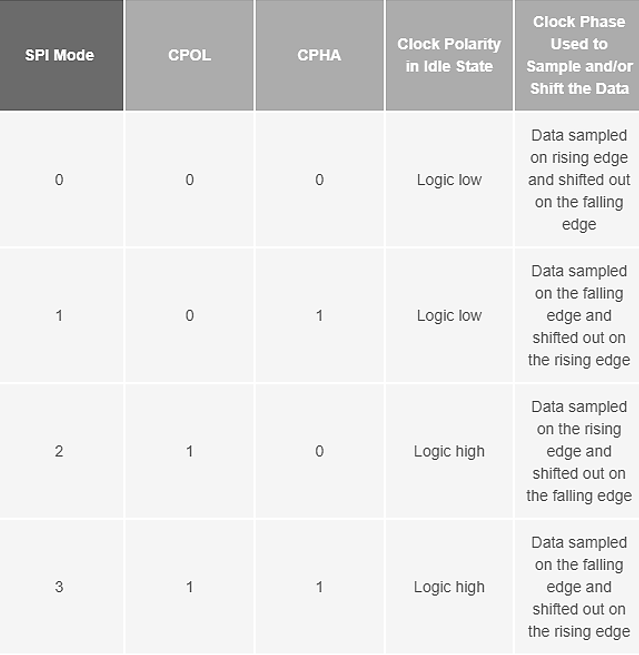
뭔가 엄청 복잡하고 피곤해보이지만, 가만 보면
CPOL = 0 or 1값과CPHA = 0 or 1값에 따라서 어느 시점에 어떻게 데이터를 주고 받을지를 결정하는 규칙일 뿐이다.
데이터 통신을 하지 않는 대기 상태 (IDLE)에서 클럭 핀 (SCLK)의 레벨을 High로 둘 것인가 Low로 둘 것인가를 정하는 것이 CPOL 값이고, 데이터를 읽는 타이밍이 rising edge 인지 falling edge 인지를 선택하는 것이 CPHA 값이다.
참고로 읽는 타이밍이
rising edge라면 쓰는 타이밍은 그 반대인falling edge이다.
SPI 통신 모드의 경우는 어느 정도 합의된 것으로 보이지만, 개발 환경에 따라 조금씩 상이할 수 있으므로 자신이 개발하는 플랫폼의 설정을 잘 확인해야할 것이다. (간혹, A 플랫폼에서 SPI MODE0 라는 설정 값이, B 플랫폼에서는 SPI MODE1에 대응될 수도 있다.)
12.3.1 ADXL343 가속도 센서 통신 모드 확인하기
통신 모드 관련해서는 앞서 참고한 링크 (https://www.analog.com/en/analog-dialogue/articles/introduction-to-spi-interface.html)에도 상세하게 나와있지만, 이를 이해하는 가장 좋은 방법은 본인이 직접 사용할 센서를 이용해서 테스트해보는 것이다.
마침 필자가 가지고 있는 ADXL343 이라는 가속도 센서의 데이터 시트를 보면서 실제로 SPI 통신 모드를 어떻게 확인하면 되는지 알아보자.
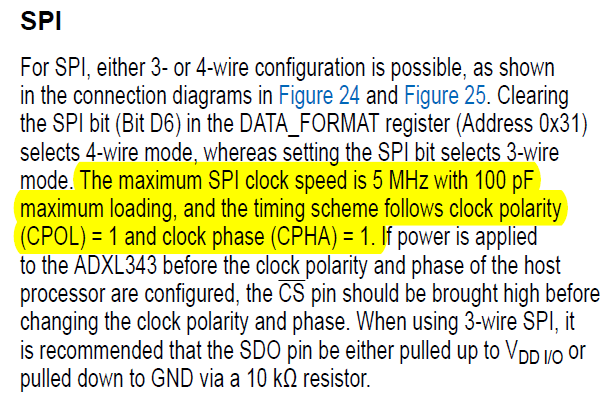
제어하고자 하는 센서의 데이터 시트에서 SPI 통신과 관련된 부분을 확인해보면, 대부분 아래 그림처럼 해당 센서의 SPI 통신 타이밍이 어떻게 설정되었는지 명시되어 있다. 현재 필자가 참고한 데이터 시트의 경우는 CPOL, CPHA 값 모두 1 인 조건 (SPI MODE 3)에서 상호작용한다고 명시되어있다.
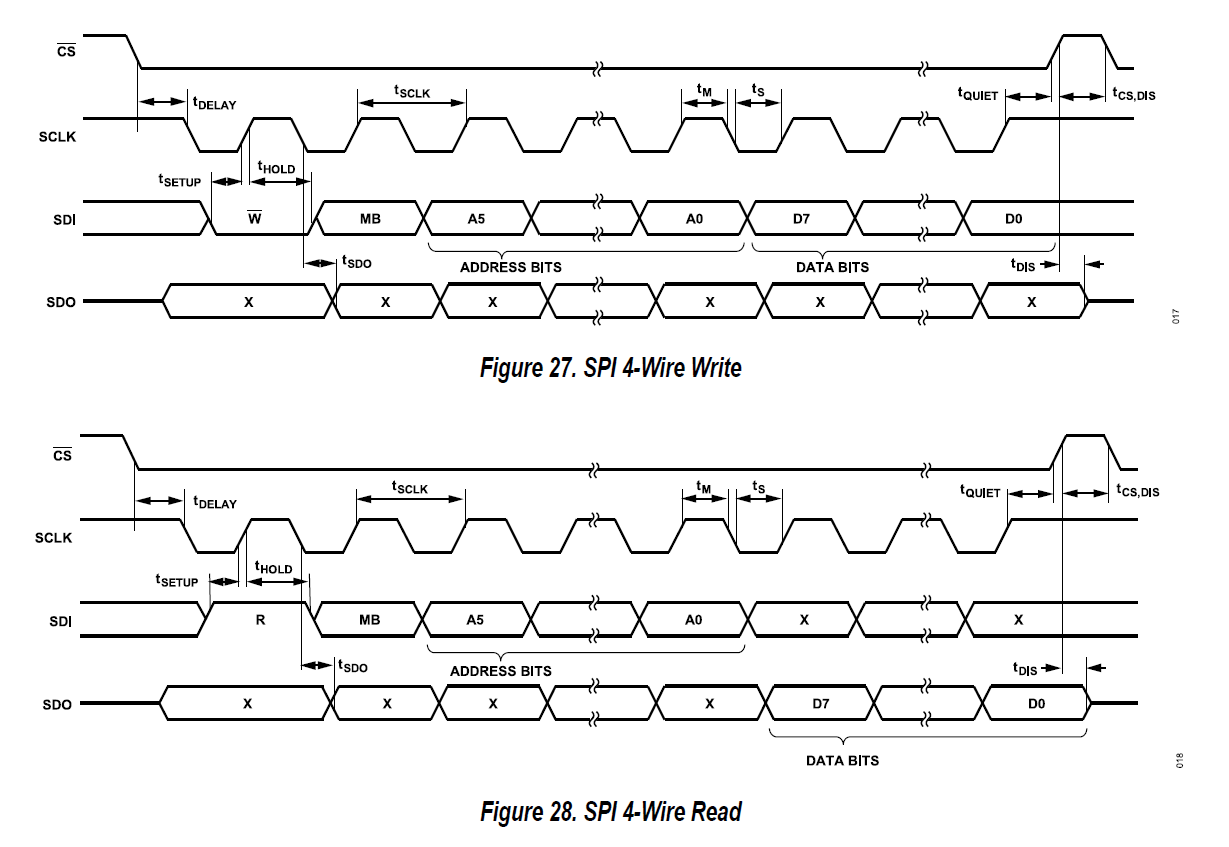
대부분의 센서 데이터 시트에서는 아래 그림과 같은 다이어그램을 함께 제공해준다. 이를 보면서 데이터 시트에서 명시한 CPOL, CPHA 값이 이와 일치하는지 확인해보도록 하자.
12.3.2 CPOL 확인하기
먼저, CPOL 값은 위의 그림에서 통신을 하지 않는 시점에 (CS = High) SCLK 값이 어떻게 되어있는지 보면 된다.
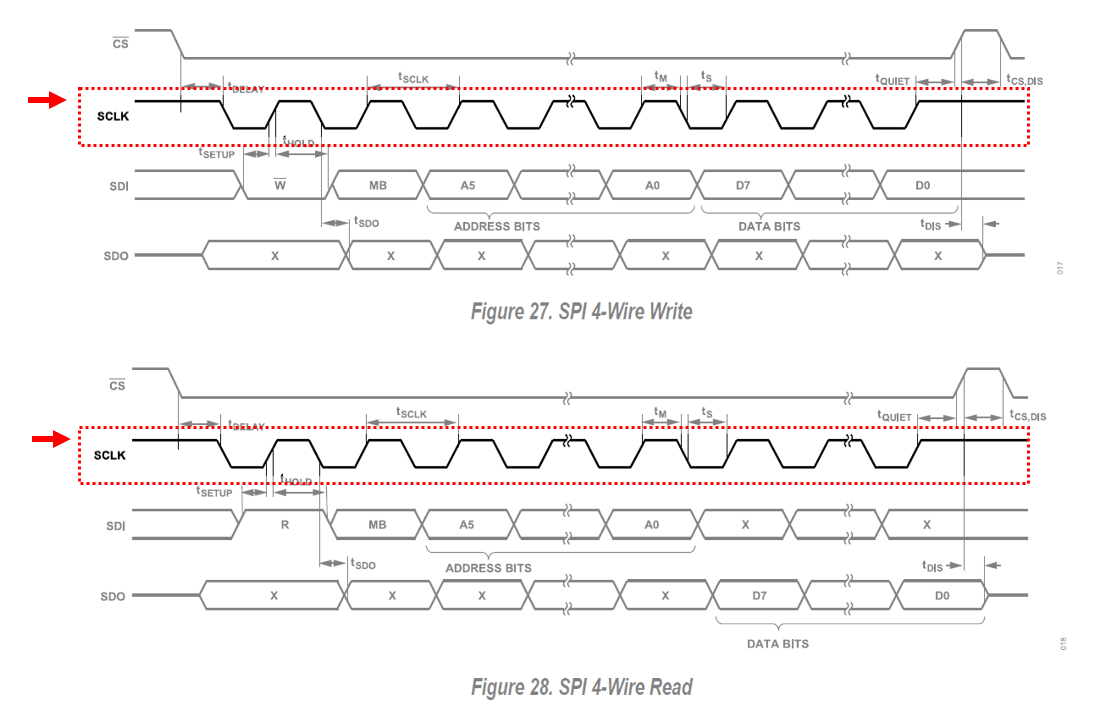
그림에서 볼 수 있듯이
IDLE상태에서의SCLK값이High이다. 따라서CPOL값은1로 설정된 것이 맞다는 것을 확인할 수 있다.
12.3.3 CPHA 확인하기
CPHA 값은 다이어그램에서 확인해보기가 어려울 수도 있긴한데, 이 부분도 확인은 가능하다. 맨 처음에 살펴본 것과 달리 핀 이름이 SDI, SDO 라고 되어있어서 헷갈릴 수 있으나, 명령을 보내고 데이터를 받는 주체 (Master)가 누구인지를 생각해보면 된다.
아래 그림에서 write 시점 (Figure 27)을 보면, SDI 라인을 통해 원하는 레지스터의 주소와 데이터를 전송하고 있다는 것을 볼 수 있다. 즉, 해당 핀이 앞서 살펴본 MOSI 핀에 해당되며, 이때 데이터를 쓰는 타이밍 (Shift-out)을 보면 rising edge 에 수행되고 있는 것을 볼 수 있다.
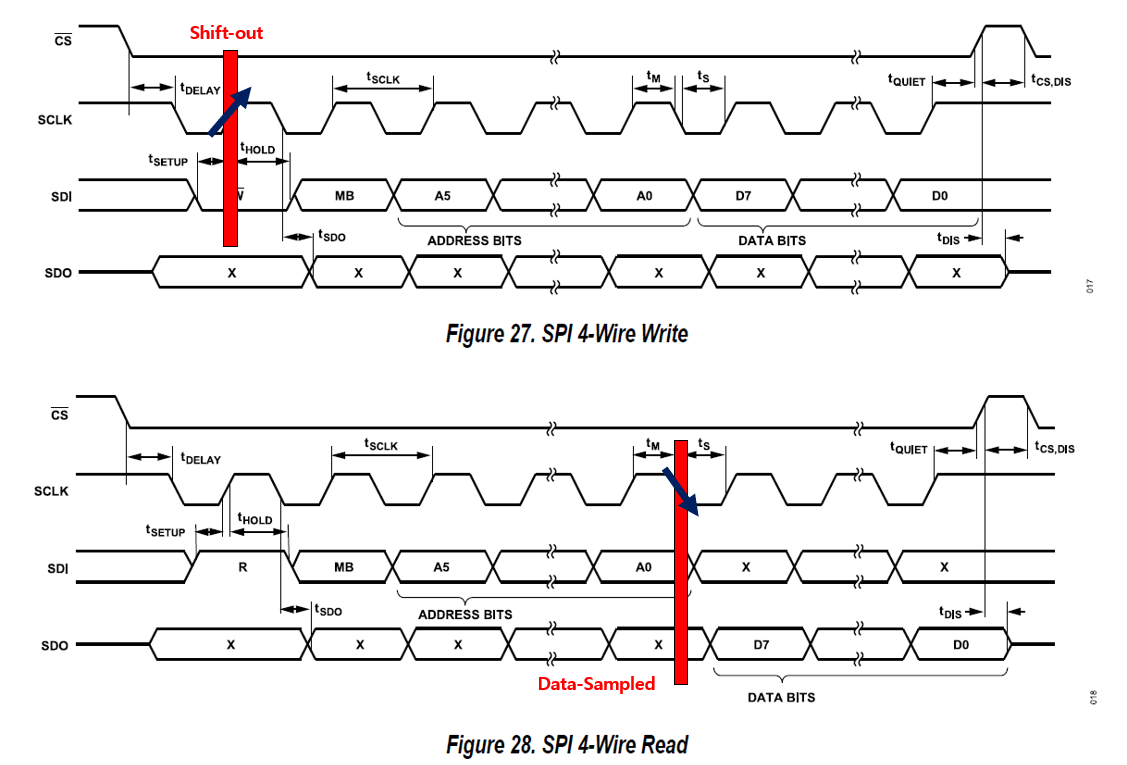
자연스럽게 read 신호는 SDO 라인을 통해 들어오고 있으며 (Figure 28), 이러한 Data sampling 동작은 write 와 반대되는 falling edge에 수행되고 있는 것을 볼 수 있다. 즉, CPHA 값도 데이터 시트에서 명시한 1 값이 맞다는 것을 알 수 있다.
12.4 nRF5 SDK 에서의 SPI 제어
이전 포스팅에서 살펴본 것처럼, SPI 예제 또한 nRF5 SDK 에서 제공해주기 때문에 이와 관련해서는 별도로 예제를 다루지는 않으려고 한다 (절대 귀찮아서가 아니다).
구글링을 조금만 해봐도 어떤 식으로 명령어를 주고 받아야하는지 정리한 글들이 많으니,
SPI관련 소스 코드는 다른 블로그의 글들을 참고하자.
다만, 한가지 유의할 점으로는… I2C 와 비슷하게 SPI 명령어에도 write / read 데이터를 구분하는 1-bit가 존재한다. I2C의 경우는 해당 비트가 Slave 고유 주소 (7-bit) 뒤에 0 또는 1로 위치하는데, nRF5 SDK 에서는 tx (write), rx (read) 명령에 따라 해당 비트를 자동으로 채워준다.
“이 부분은 SPI 관련 함수에는 생략되어 있으므로, 직접 채워줘야 하니 참고하길 바란다.”
앞서 살펴본 12.3 의 다이어그램을 보면, Address bit (
SPI로 제어할 Slave 기기의 레지스터 주소) 앞쪽에 write (1)와 read (0) 명령을 구분하기 위한 비트와 여러 레지스터에 접근할 것인지를 묻는 비트 (MB)가 위치하는데,nRF5 SDK에서는 이 부분을 직접 채워줘야 한다.
Comments