IoT (8) - AIS2IH 가속도 센서 (Accelerometer) 제어
Updated:
8. AIS2IH 가속도 센서 (Accelerometer) 제어 (with nRF52840-DK)
8.1 AIS2IH 가속도 센서 개발 준비
가속도 센서 (Accelerometer) 는 센서에 명시된 3축 (x,y,z) 에 가해지는 지구 중력 가속도의 값을 측정하는 장치로, 이를 이용해서 물체가 기울어진 정도나 방향을 확인할 수 있다. 일반적인 가속도 센서의 경우 작은 변화에도 값이 크게 변동하는 문제가 있지만, 이를 활용해 물체가 움직이는지 아닌지 판단할 수도 있다 (오히려 좋아! 🧔🏻).
- 하드웨어 Setting:
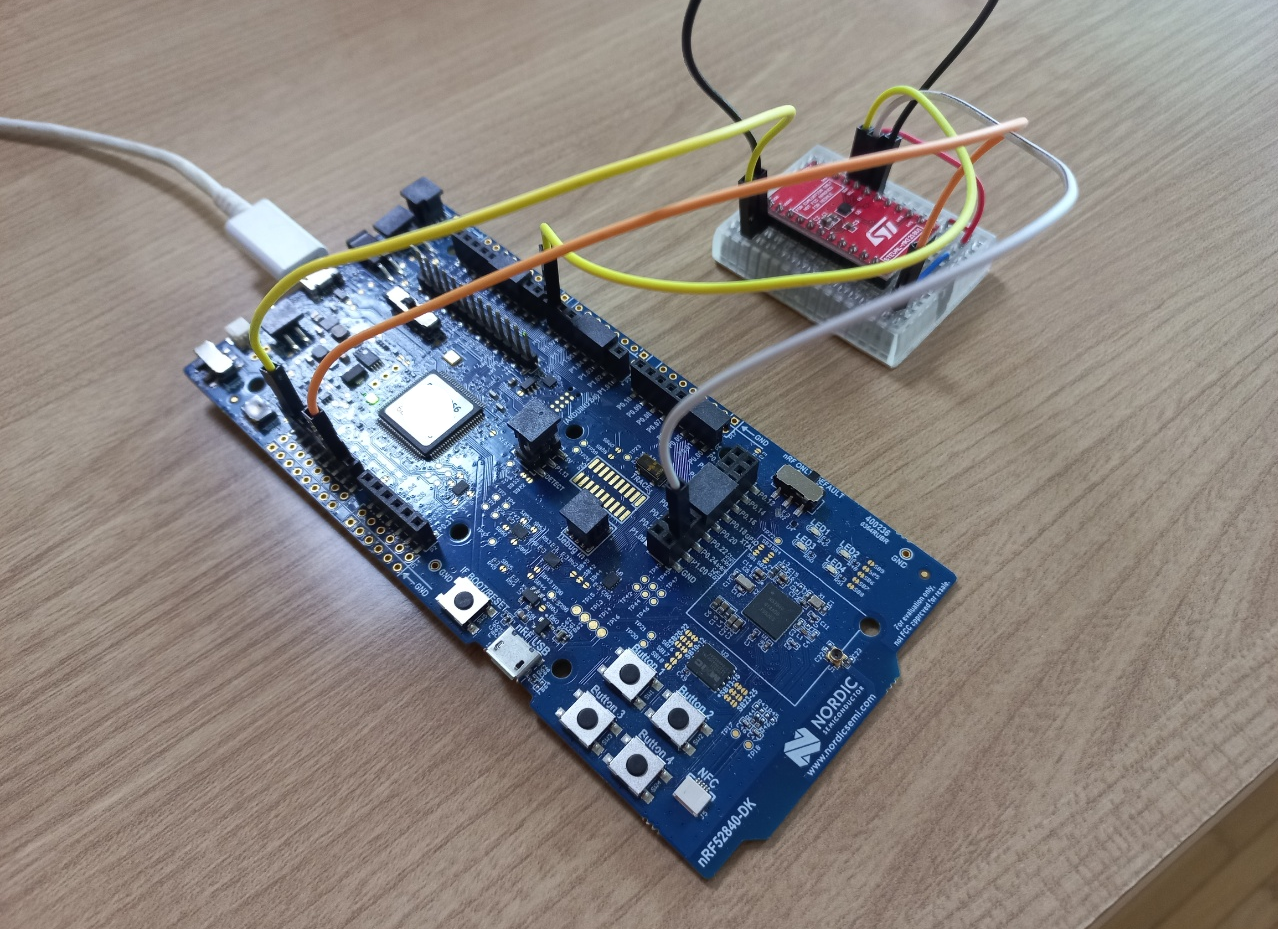
STMicroelectronics 사의 AIS2IH 가속도 센서 테스트를 위해 위의 그림과 같이 nRF52840-DK 보드와 해당 가속도 센서가 탑재된 키트 (STEVAL-MKI218V1)를 연결해주었다. 가속도 센서의 각 축의 방향은 아래 그림과 같고, I2C 통신을 이용해 센서를 제어하였으며, 센서 키트에 나와있는 핀 중 실제로 사용된 6개의 핀을 아래 그림에 나타내었다.
- STEVAL-MKI218V1 Setting:
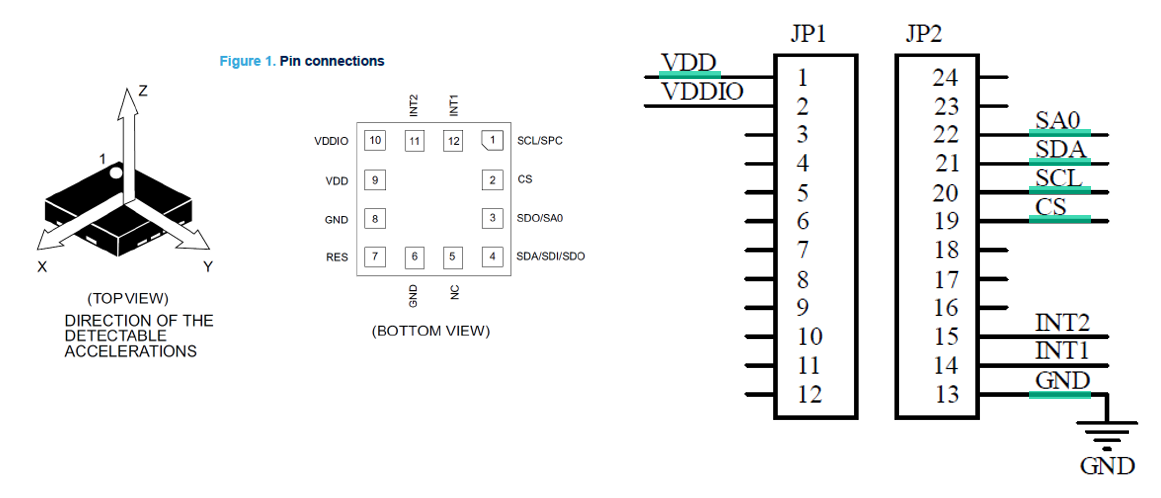
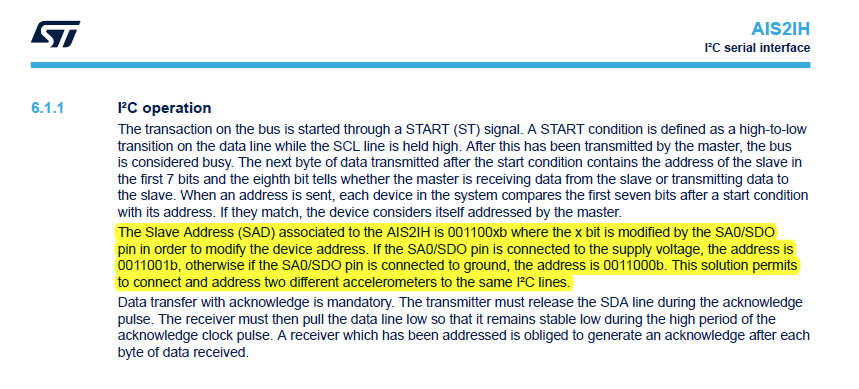
센서 (키트)의 핀 중 SA0 는 가속도 센서의 I2C 슬레이브 주소 값을 설정하기 위한 핀이다. AIS2IH 데이터 시트에 명시되어 있듯이, I2C 슬레이브 주소 7 bits 중 앞의 6 bits = [6:1] 값은 0b001100 으로 정해져있고, SA0 값에 의해 마지막 0번째 비트 값 (LSB) 이 결정된다 (아래 그림 참조).
SA0 = VDD:0b0011001=0x19
SA0 = GND:0b0011000=0x18
8.2 주요 레지스터
하드웨어 설정이 완료되었다면, I2C 프로토콜을 이용해서 센서의 레지스터 값을 읽거나 쓰는 것으로 AIS2IH 가속도 센서를 제어할 수 있다. 기본적인 센서 제어에는 다음의 레지스터 정도만 활용해도 충분할 것 같다.
0x20: 가속도 측정 주기, 동작 모드, Low-Power 모드 설정0x25: 하드웨어 필터, Full-Scale, Low-Noise 모드 설정0x28~0x2D:x,y,z축 가속도 측정 값 (14 or 12 bits)
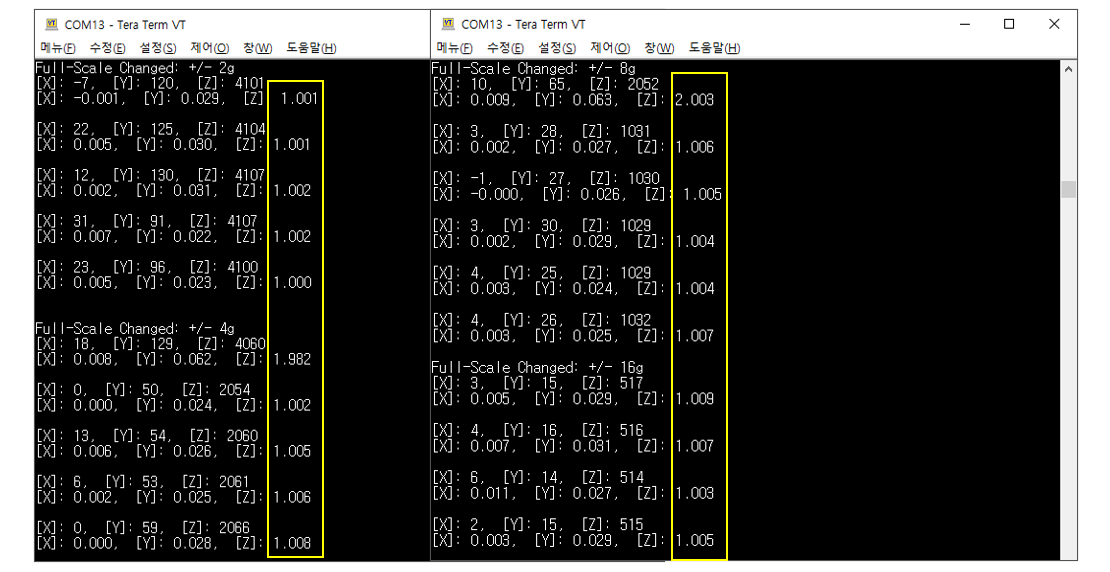
아래 그림은 레지스터 설정 이후 가속도 센서 값이 들어있는 레지스터 값을 읽은 경우의 예시를 보여준다. 센서는 본 포스트 제일 첫 번째 그림 (사진)과 같이 z 축 값이 가장 큰 값을 갖도록 지면과 평행하게 두었고, 가속도 측정 값의 resolution 은 14 bits 로 설정했기 때문에 부호 (+/-) 비트를 제외하고 13 bits 의 값으로 표현된다. (출력 값 범위: -8192 ~ +8191)
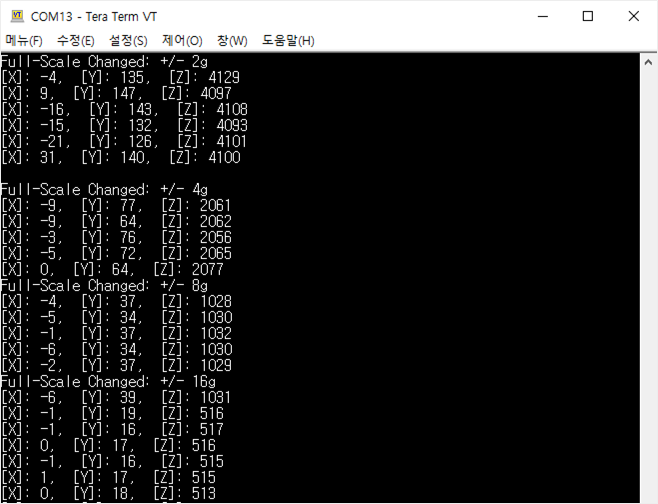
위 그림을 보면 +/-2g Full-Scale 기준으로 출력 값이 4000 정도인 것을 확인할 수 있고, Full-Scale 값 (+/-2,4,8,16g) 을 높일 수록 출력 값이 작아지는 것을 볼 수 있다 👩🏽🚀.
여기서의 Full-Scale 이란
-8192 ~ +8191가속도 센서 값이 나타내는 중력 가속도 값의 범위를 나타낸다. 즉, Full-Scale 을+/-2g로 설정할 경우, 센서 출력 값이 나타낼 수 있는-8192 ~ +8191이란 범위는+/-2g의 중력 가속도와 매칭되는 것을 의미한다. 평상시 지구 중력 가속도는1g이므로+/-2g의 Full-Scale 에서z축 출력 값은4096전후의 값이 측정되는 것이다.
같은 원리로 Full-Scale 값이 +/-16g 인 경우에는 센서 출력 +8191 이 +16g 에 해당되기 때문에 평상시 +1g 조건에서는 512 전후의 값이 측정된다. 아래 그림은 이러한 관계를 토대로 해서 센서 출력 값을 중력 가속도 (g) 단위로 변환한 예시를 보여준다.
Comments